JKSPE
사람의 보행 보조를 위한 주름식 팽창형 구동기의 이론적 모델 제안 ( A Theoretical Model for an Inflatable Wrinkle Bending Actuator)
사람의 보행 보조를 위한 주름식 팽창형 구동기의 이론적 모델 제안
김정/KAIST
-
기존의 주름식 팽창형 구동기 설계를 위한 이론적 모델링 기법을 제안한다. 특정 관절에 한정하는 것이 아닌 다양한 관절의 조건에 맞추어 구동기 설계 조건을 도출할 수 있다.
-
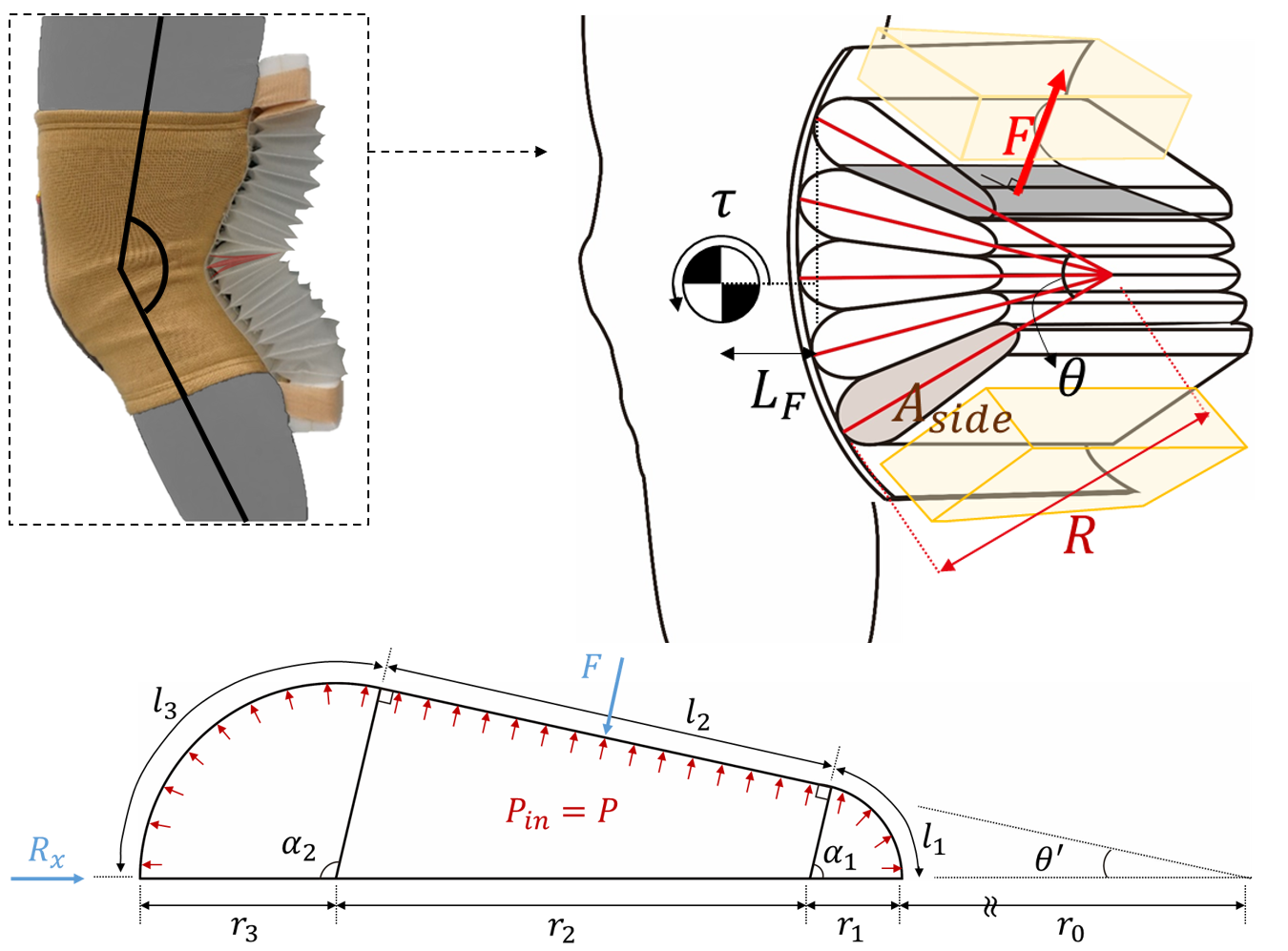
주름식 팽창형 구동기는 14Nm의 토크를 제공하여 사람 보행 주기 중 유각기에 발생하는 무릎 토크를 100% 보조하고자 한다. 이론적 모델을 통해 출력 조건을 만족 시키는 설계 조건을 구할 수 있었으며, 레이어의 높이와 개수는 6cm, 19개로 구하였다.
-
설계 조건에 따라 제작된 구동기는 120˚에서 최대 12.93 Nm를 제공할 수 있었다. 또한 각도와 구동기의 압력 따라 제공하는 토크는 이론 값과 10% 이내의 오차를 보이며 높은 정확도를 보여준다.
-
더 나아가 제안된 이론적 모델은 무릎 외의 다른 관절을 위한 구동기의 설계 조건을 결정할 수 있다.