JKSPE
Development of the Algorithm of Locomotion Modes Decision based on RBF-SVM for Hip Gait Assist Robot
RBF-SVM 기반 고관절 보행 보조 외골격 로봇의 보행 모드 판단 알고리즘 개발
한창수/한양대학교
-
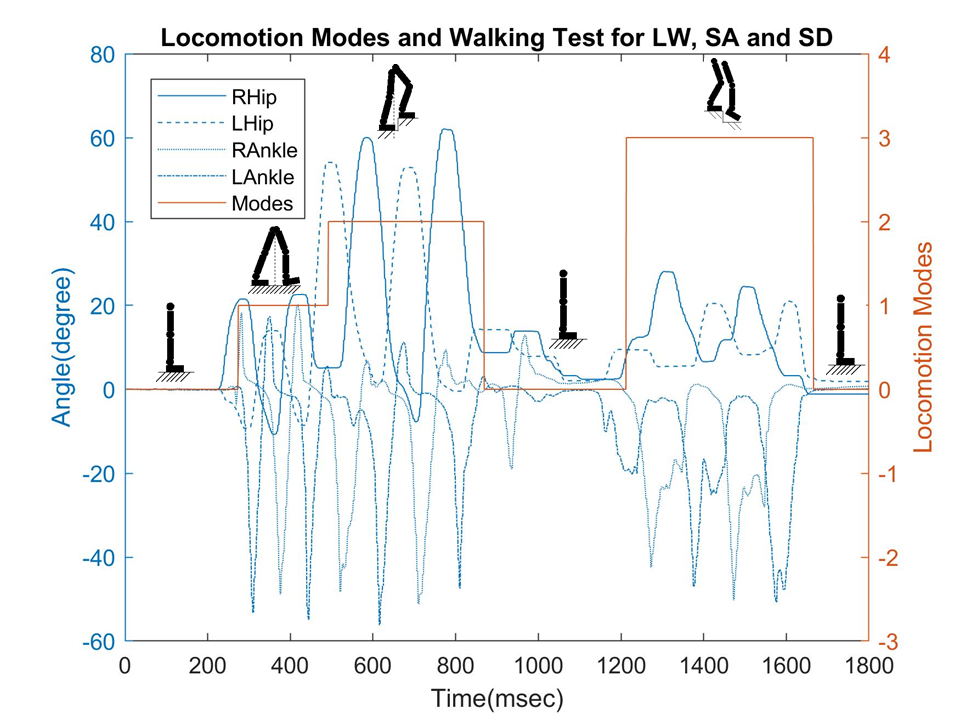
본 연구는 다양한 지형(평지,계단오르막,계단내리막)에서 사용하기 위한 고관절 보행보조 외골격 로봇의 알고리즘을 개발하는 것을 목적으로 함
-
해당 알고리즘은 머신러닝 기법인 RBF-SVM을 활용하여, 개인마다 다르게 나타나는 보행 파라미터를 학습하는 과정을 제안함
-
오프라인 과정에서는 사용자의 보행 파라미터를 학습하고, 이를 통해 도출된 파라미터를 온라인 상에서 사용하여 다양한 지형을 분류하는 알고리즘을 제안함
-
제안된 알고리즘은 고관절 보행보조 외골격 로봇 알고리즘에 적용하여 테스트 진행하였으며, 알고리즘의 성능을 평가 진행함