IJPEM
Development of a Lightweight and High-efficiency Compact Cycloidal Reducer for Legged Robots
보행로봇을 위한 경량 고효율 사이클로이드 감속기 개발
오준호/한국과학기술원
-
로봇과 접촉하는 환경에 힘을 전달해주기 위해 토크손실이 적은 고효율 감속기가 최근 각광받고 있다.
-
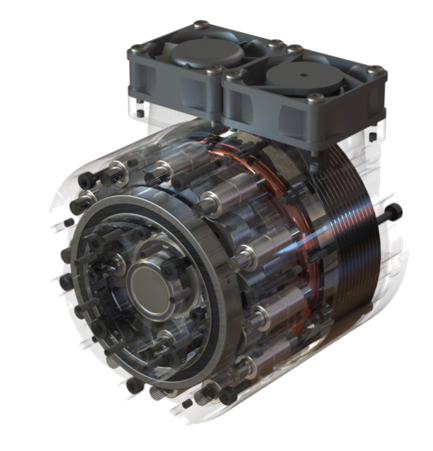
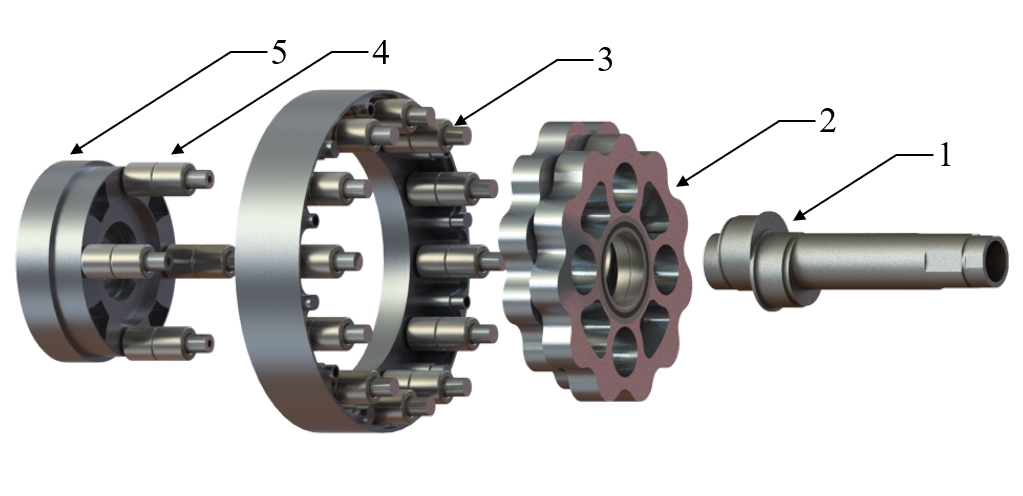
본 논문에서는 베어링을 이용한 경량, 고효율 사이클로이드 감속기를 개발하였다.
-
개발된 사이클로이드 감속기는 보행로봇에 주로 사용되는 하모닉드라이브나 기존 사이클로이드 감속기보다 효율적이며 유성기어로 달성하기 힘든 감속비를 구현할 수 있다.
-
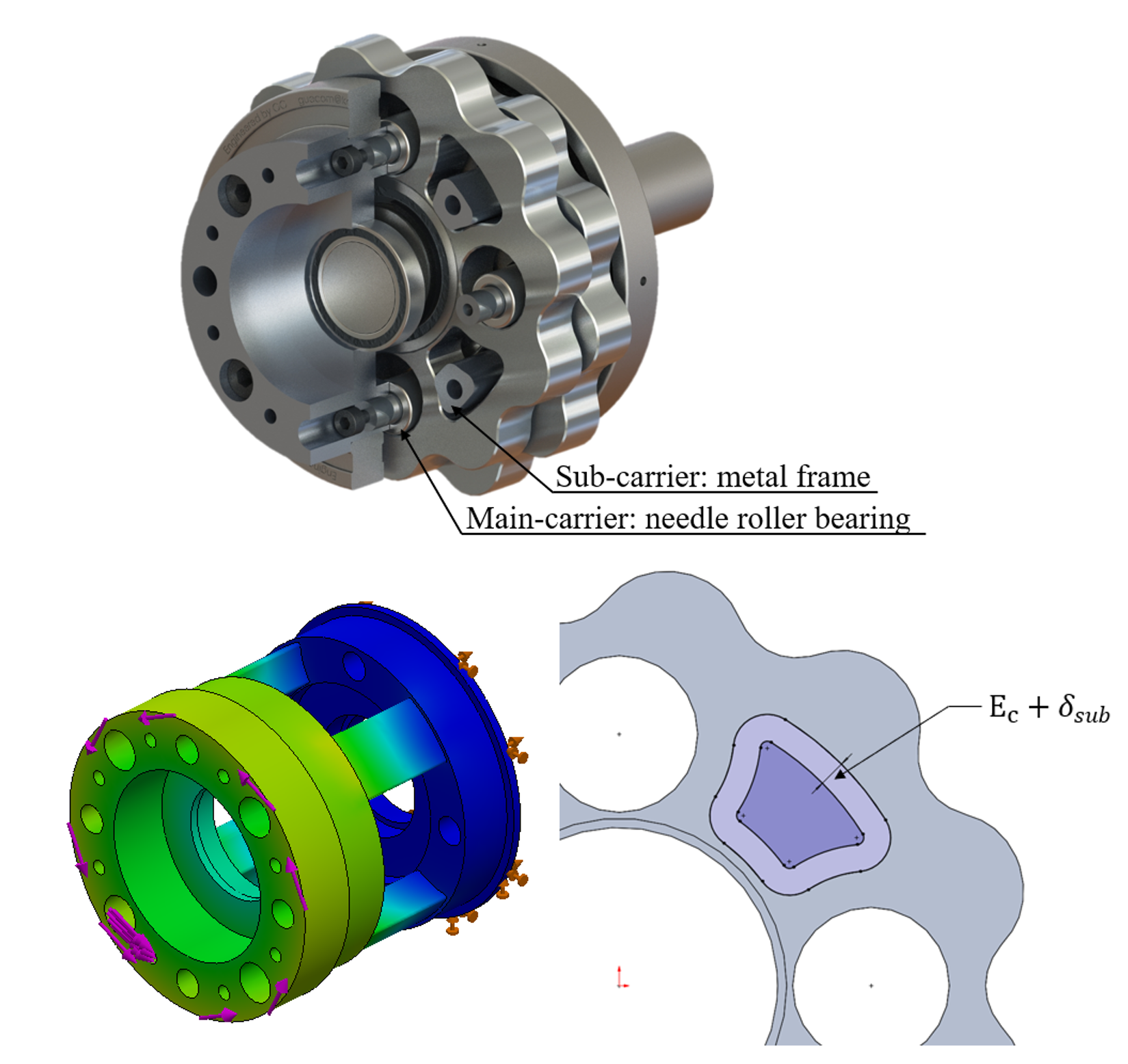
이 사이클로이드 감속기는 허용 토크 이상의 하중을 분산해주는 sub-carrier 구조를 포함하여 보행로봇과 같은 큰 충격이 들어오는 사용 환경에서도 잘 작동할 수 있다.