JKSPE
구속 운동을 고려한 병렬기구 기계의 기상측정 정확도 개선
병렬기구 가공로봇의 구속 운동 보상을 통한 기상측정 정확도 개선
양승한/경북대학교
-
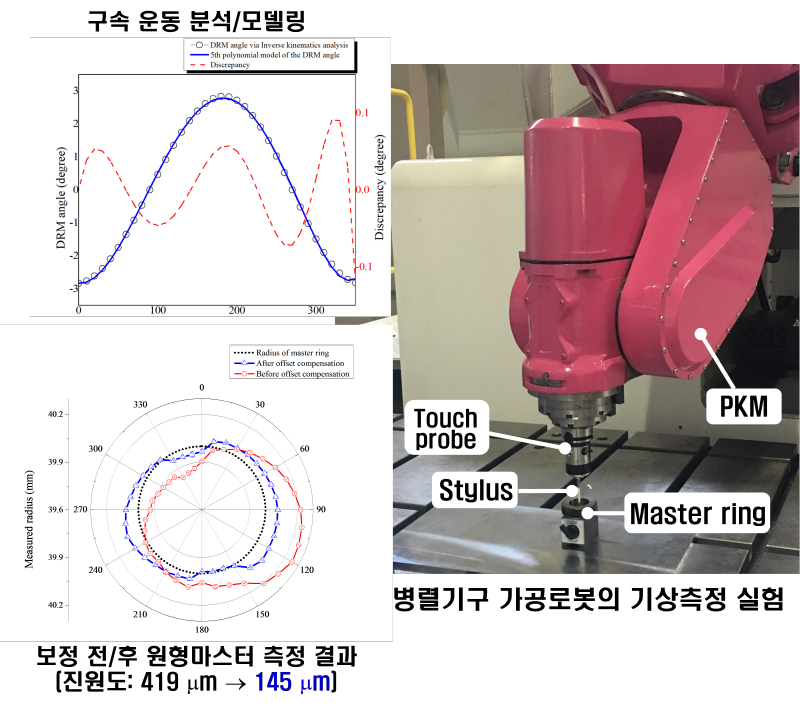
고자유도, 고강성 병렬기구 가공로봇(parallel kinematic machining robot)의 기상측정(On-machine measurement) 기술 개발
-
기상측정 정확도 향상을 위한 측정 기술: 1) 병렬기구 로봇의 구속 운동 보상 방법, 2) 터치프로브 오프셋 측정 및 보상 기술
-
원형 마스터(진원도: 2 m) 및 측정/보정 기술을 적용하여 측정정확도 65% 개선(보정 전: 0.419 mm 보정 후: 0.145 mm)
-
병렬기구 가공로봇 기상측정 기능의 신뢰성 향상 및 구속 운동 보상 기술을 통한 병렬기구 가공로봇의 활용폭 증가 기대