IJPEM
Dynamic Posture Stabilization of a Biped Robot SUBO-1 on Slope-Changing Grounds
바닥 기울기가 변하는 환경에서의 이족 보행 로봇의 균형 유지 전략
김정엽/서울과학기술대학교
- 휴머노이드 로봇이 미래 인간 생활 환경에 적응하거나, 복잡한 험지에서의 미션을 수행하기 위해서는 어떠한 상황에서도 균형을 잃지 않고 자세를 안정화할 수 있어야 한다.
- 서울과기대의 김정엽 교수 연구팀에서는 이러한 휴머노이드 로봇의 자세 안정화 제어 기법을 다양하게 연구하고 있으며, 본 연구에서는 지면 기울기가 연속적으로 변화하는 상황에서 Zero Moment Point (ZMP) 를 발 지지 영역 안으로 제어함과 동시에 안정한 보행을 수행할 수 있는 제어 프레임 워크를 개발하였다.
- 두 개의 플랜트 모델을 이용하여 각각에 대해서 상태 관측 방식의 외란 관측기 및 상태 피드백 ZMP 제어기 설계를 수행하였고, ZMP 제어와 동시에 지면 경사로부터의 외란을 온라인 상에서 효과적으로 소거하는 방법을 제안하였다.
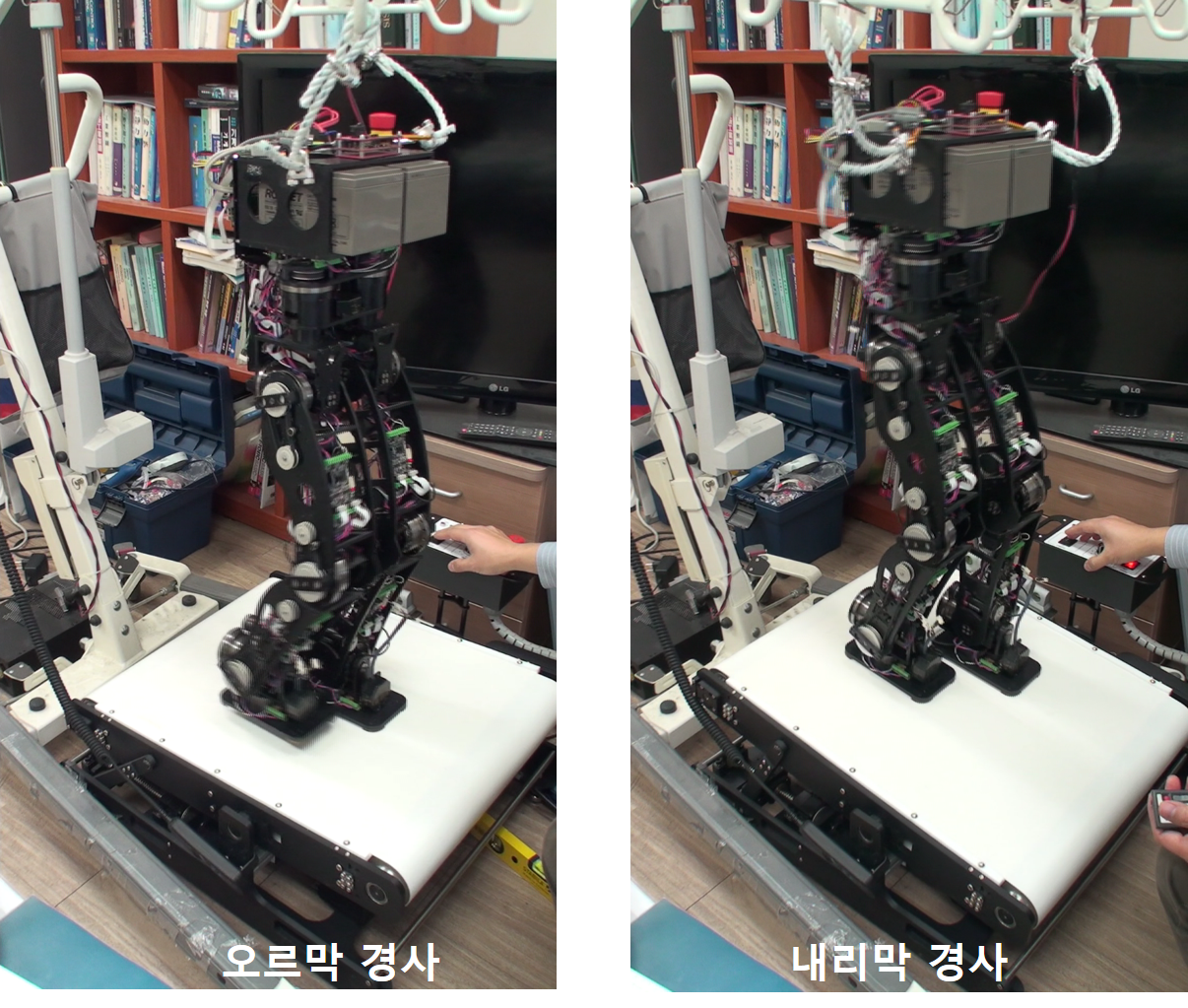
- 김정엽 교수팀이 개발한 SUBO-1 이라는 이족 보행 로봇과 실시간 경사 조절이 가능한 런닝 머신을 이용하여, 본 연구에서 제안된 제어 전략의 성능을 실험적으로 검증하였다.