IJPEM
Robotic Camera Calibration to Maintain Consistent Precision of 3D Trackers
스테레오 위치추적장치의 보정 파라미터 편차를 획기적 감소시키기 위한 로보틱 캘리브레이션 방식 제안
서준호/한국기계연구원
-
스테레오 카메라의 보정 파라미터를 계산하기 위해 체크보드 영상 여러 장을 이용하는데, 기존 사람에 의한 체크보드 영상으로는 일정한 카메라 파라미터 값을 얻기가 어렵고, 이때문에 마커 추적 시 정밀도에도 영향을 줌,
-
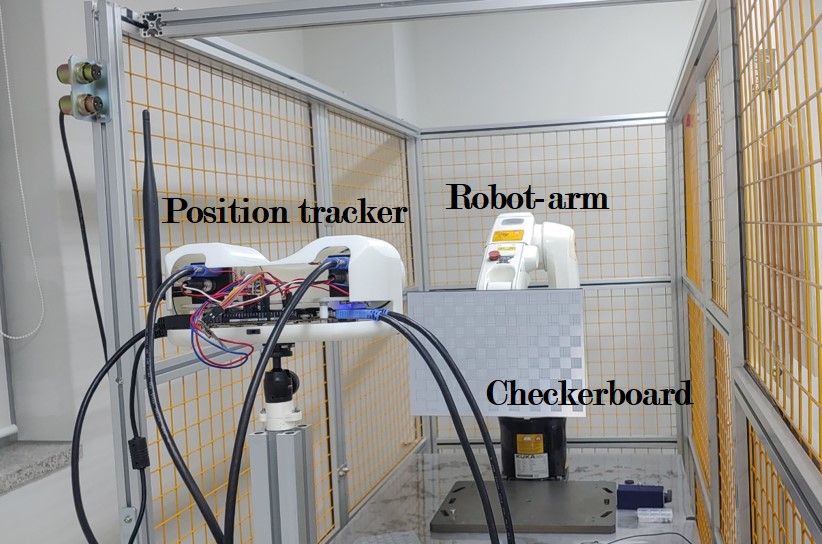
특히 같은 카메라를 여러 대 제작해야 하거나, 카메라를 분해/조립했을 때 카메라 보정을 해야 하는데, 이때 카메라 파라미터 편차를 줄이기 위해 로봇팔(robot arm)을 이용한 캘리브레이션 방법을 제안함.
-
본 논문에서는 로봇팔을 이용하여 설정된 위치에서 체크보드 영상을 얻은 경우, 사람이 임의로 체크보드를 이동시켜 얻은 영상으로 보정했을 때에 비해 Intrinsic, Extrinsic 파라미터 모두에서 그 편차가 획기적으로 감소함을 실험으로 검증함.
-
또한 로봇에 의한 보정 방식이 기존 보정 방법보다 마커 추적 편차도 획기적으로 줄일 수 있다는 것을 검증하였음. 따라서 스테레오 기반 위치추적 장치의 추적 정확도 일관성 유지를 위해 제안하는 방식을 사용해야 한다고 주장함.