IJPEM
A Mechatronic Mirror-Image Motion Device for Symmetric Upper-Limb Rehabilitation
대칭성 양측 상지 재활 운동 보조 로봇 개발
김정/KAIST
-
이 논문은 편마비 환자의 마비되지 않은 건측의 움직임을 따라 마비된 환측이 대칭적으로 움직임으로서 재활을 이루는 대칭적인 양측 상지 재활 운동을 보조하는 상지 로봇을 개발하였다.
-
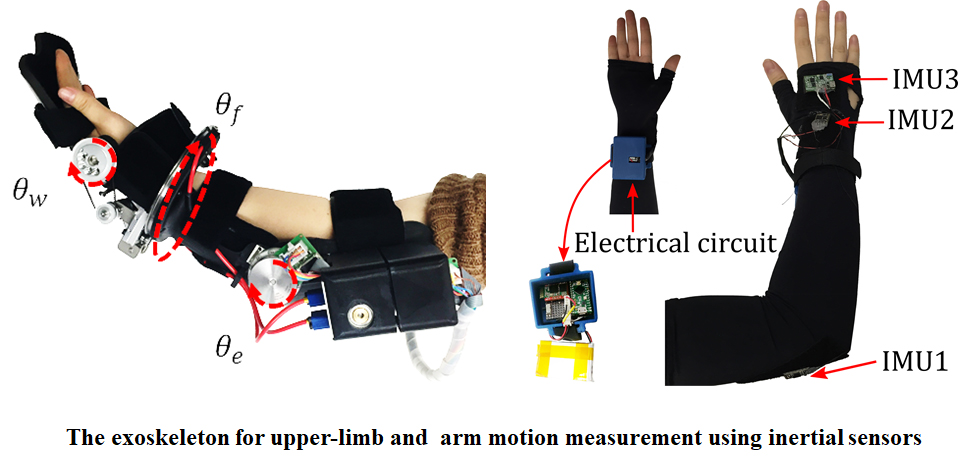
관성 센서를 이용한 팔 움직임 측정 장치는 팔꿈치 관절과 손목 관절의 신전/굴곡 움직임과 손목 관절의 내전/외전 움직임을 측정하였다.
-
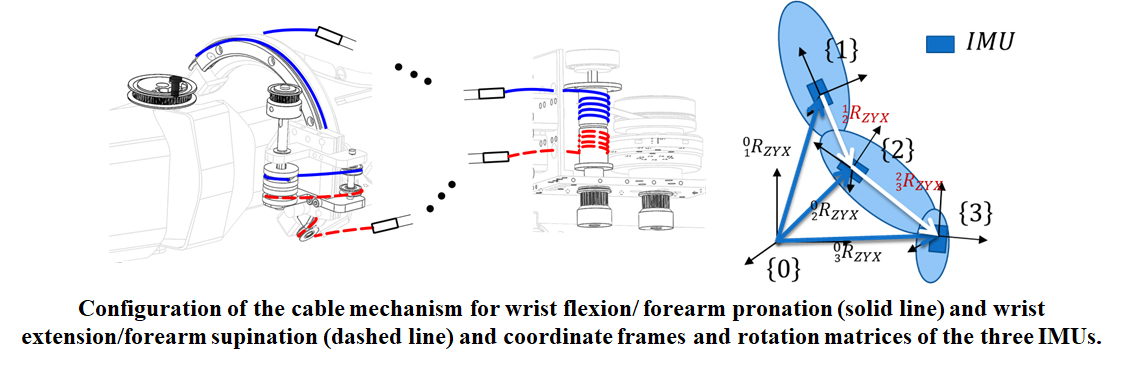
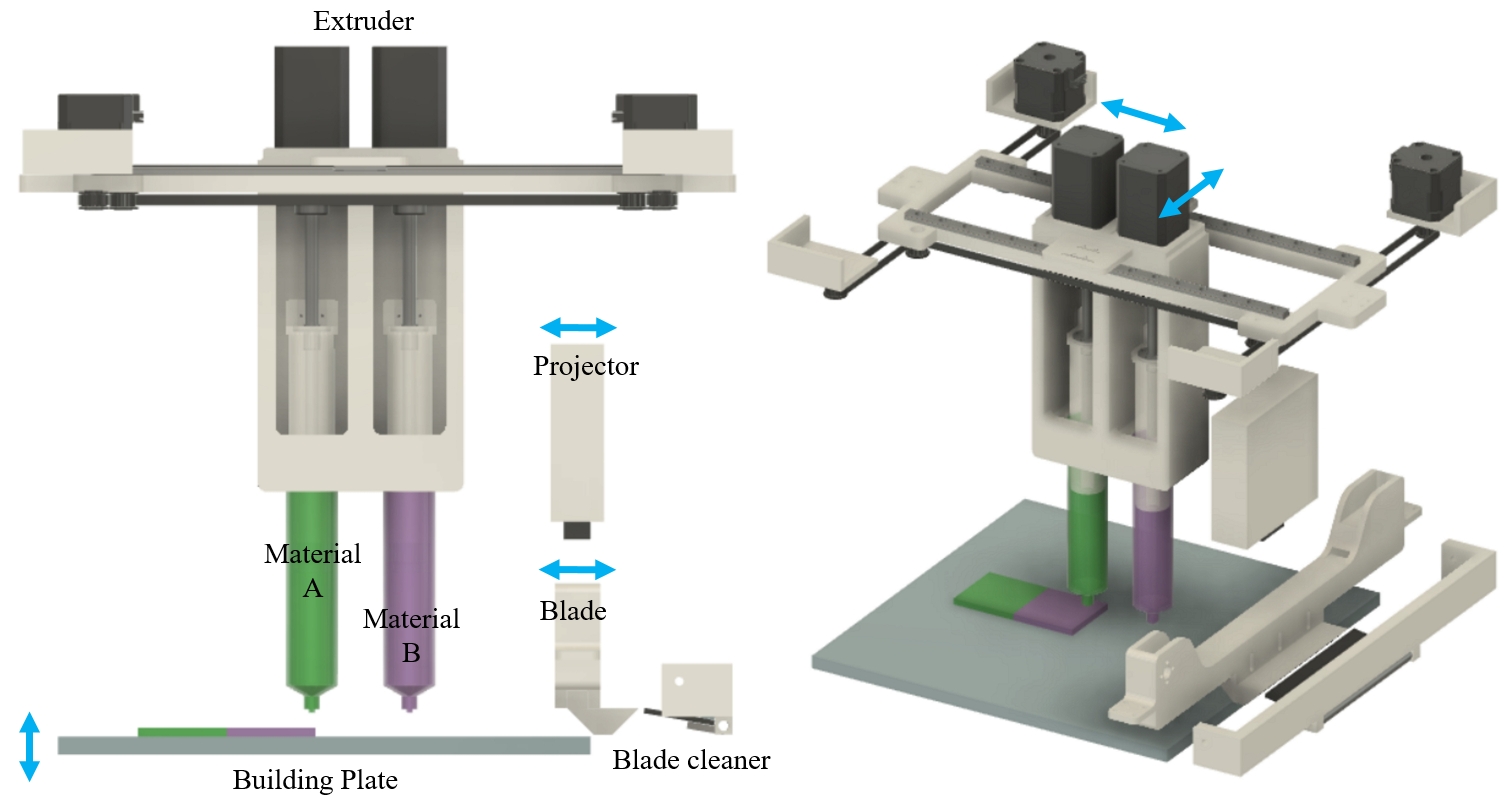
움직임 동작 장치는 2개의 모터로 3개 축의 움직임을 구현함으로써 전체 기구의 무게와 부피를 줄이고, 기구의 효율성을 높였다. 또한 케이블을 이용하여 구동함으로써 기구의 무게로 인하여 사용자가 느끼는 토크를 줄이고, 기구의 안전성을 확보하였다. 기존의 상지 재활 로봇에서와는 달리 손 부분을 개방하는 구조로 설계함으로써, 손을 이용한 다른 재활운동과 병행이 가능하도록 하였다.
-
팔 움직임 측정 장치의 정확도와, 대칭성 양측 움직임의 정확도를 확인할 수 있는 실험을 시행하여 제안하는 보조 로봇의 성능을 검증하였다.