JKSPE
힘측정 및 가변강성 기능을 갖는 3축 순응 디버링 로봇 툴 설계
힘측정 및 가변강성 기능을 갖는 로봇용 순응 디버링 툴 설계
김한성/경남대학교
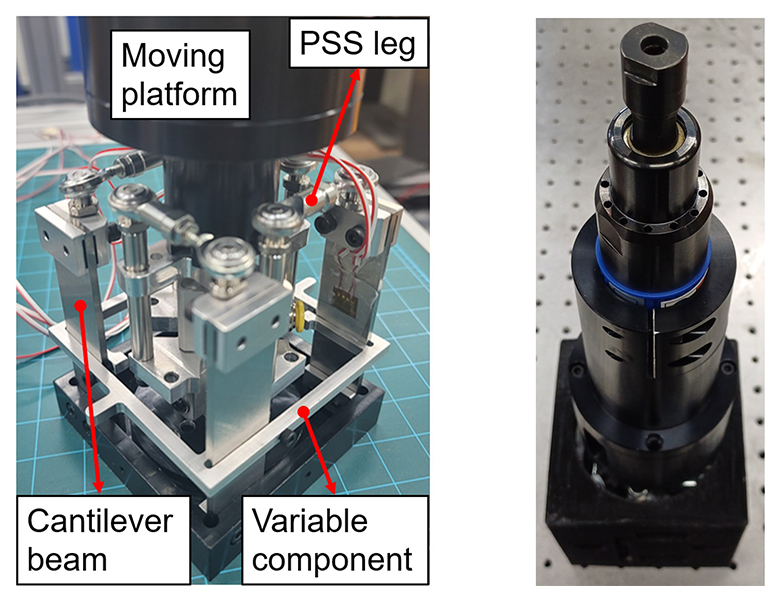
- 2자유도 병렬 메커니즘 및 1자유도 직선 조인트로 구성된 하이브리드 구조의 3축 디버링 툴 메커니즘.
- 병렬 메커니즘의 힘측정은 이물질에 강건한 Strain gauge를 Cantilever beam에 부착하여 측정되고, 직선 조인트의 힘측정은 로드셀 및 직선 스프링을 장착하여 측정됨.
- Cantilever beam의 유효 길이를 가변할 수 있는 부품을 통해 강성을 조절할 수 있음.
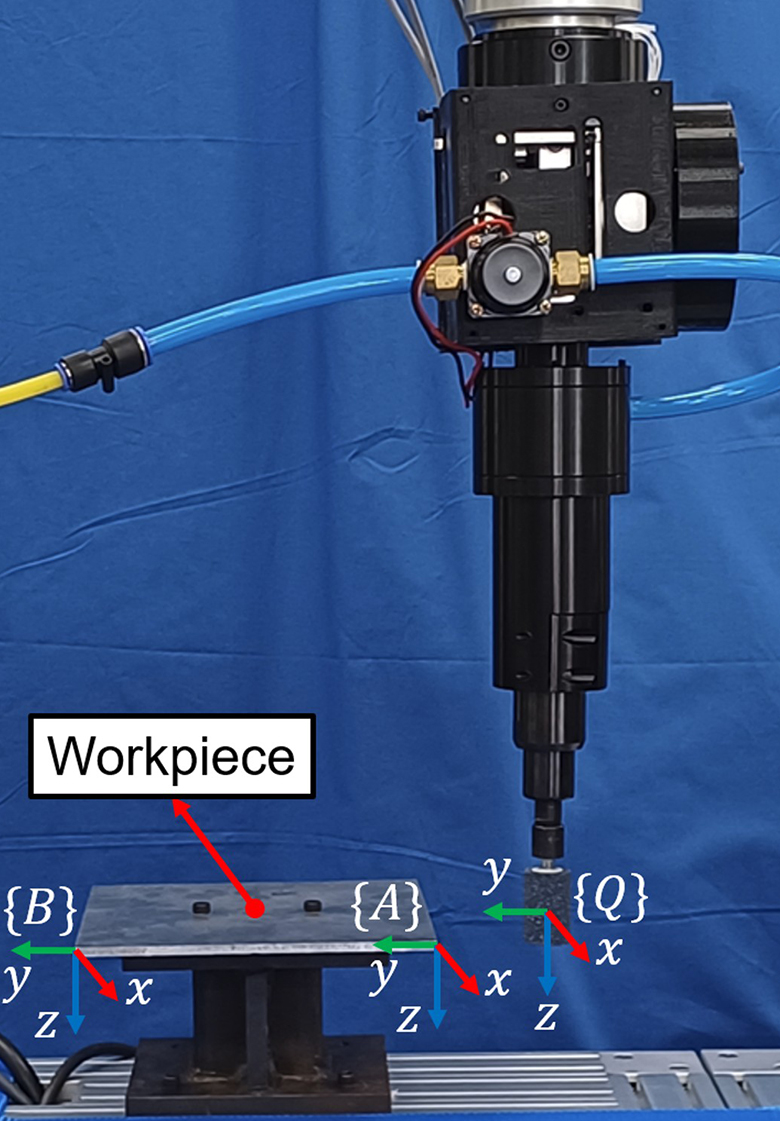
- 디버링 실험을 통해 진동에 대해 안정적임을 검증하였고, 힘측정에 대한 디버링 실험의 자동오프셋 결과 및 디버링 결과를 통해 성능이 검증됨.