IJPEM-ST
Operation Status Diagnosis of an Underwater Cutting Robot Using Adaptive Weighted Parallel 1D-DenseNet
수중 절단로봇 모니터링을 위한 딥러닝 개발
문두환/고려대학교
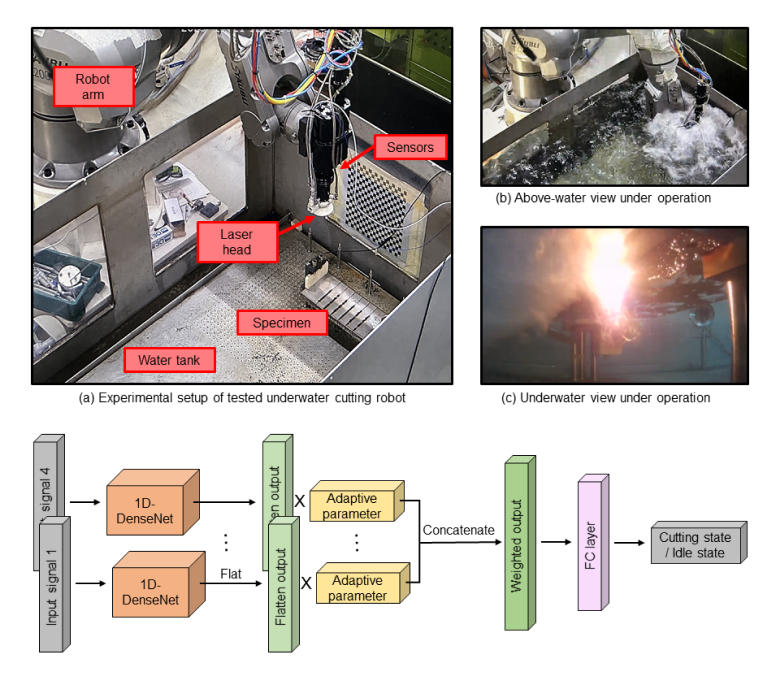
- 본 연구는 시각적 피드백이 불가능한 수중 절단로봇의 작동 상태 모니터링을 위한 딥러닝 네트워크 구조를 개발함.
- 수중 압력과 음향 센서 데이터의 시간-주파수 영역 정보를 동시에 입력 받는 병렬형 1D-DenseNet 구조를 제안함.
- 병렬형 네트워크에 적응형 가중치를 적용하여 멀티 도메인 데이터를 모델이 원활히 학습할 수 있도록 함.
- 제안하는 네트워크 구조로 안정적이고 강건한 작동 상태 진단을 가능하게 함.