JKSPE
오리가미 1T2R 병렬형 로봇의 설계 및 제어
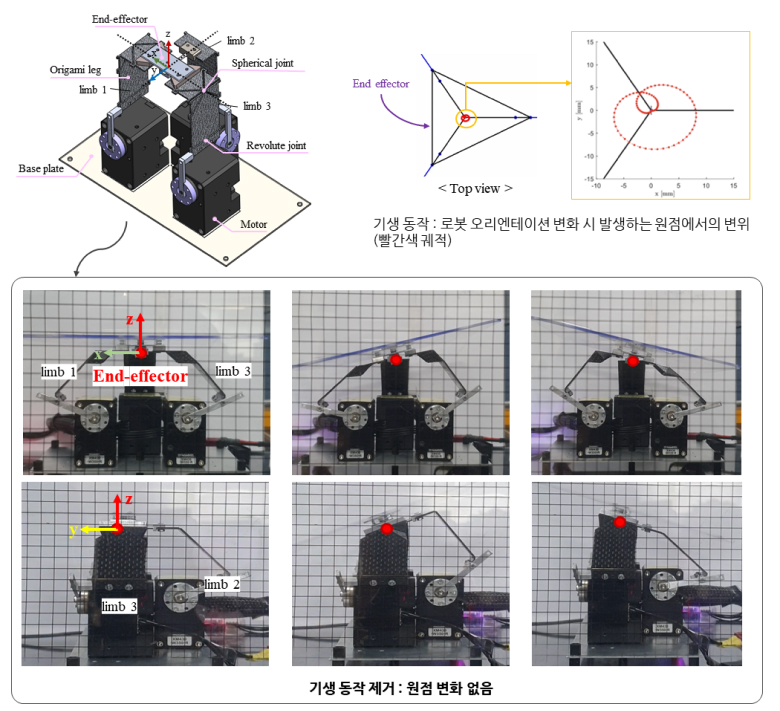
기생동작 제거 메커니즘을 적용한 오리가미 병렬형 로봇 개발
김도익/한국과학기술연구원
- 1축 이동 2축 회전 동작을 가지는 병렬형 로봇의 기구학적 특성에 따라 발생하는 기생동작을 개선하기 위한 3개 다리가 T 형태를 이루는 T-메커니즘을 적용.
- 다양한 분야에 적용할 수 있도록 오리가미 구조로 로봇 다리를 설계하여 조인트의 가동범위를 늘리고 소형화 용이하도록 개발.
- 강성과 유연성을 확보하기 위해 필름을 최적 두께로 적층하여 볼 조인트, 레볼루트 조인트 구현.
- 시뮬레이션과 실제 로봇에 검증을 통해 메커니즘의 효과를 검증하고, 기생동작이 제거됨을 보였음.