IJPEM
DNN-Based Force Estimation in Hyper-Redundant Manipulators
딥러닝을 통한 굴곡형 최소침습 수술로봇의 외력 추정 기술 개발
김정률,김계리/한국과학기술연구원
- 본 연구는 실제 수술 환경을 반영하여 외력, 케이블 장력, 마찰, 신장을 포함한 굴곡기구의 물리 기반 모델을 개발함.
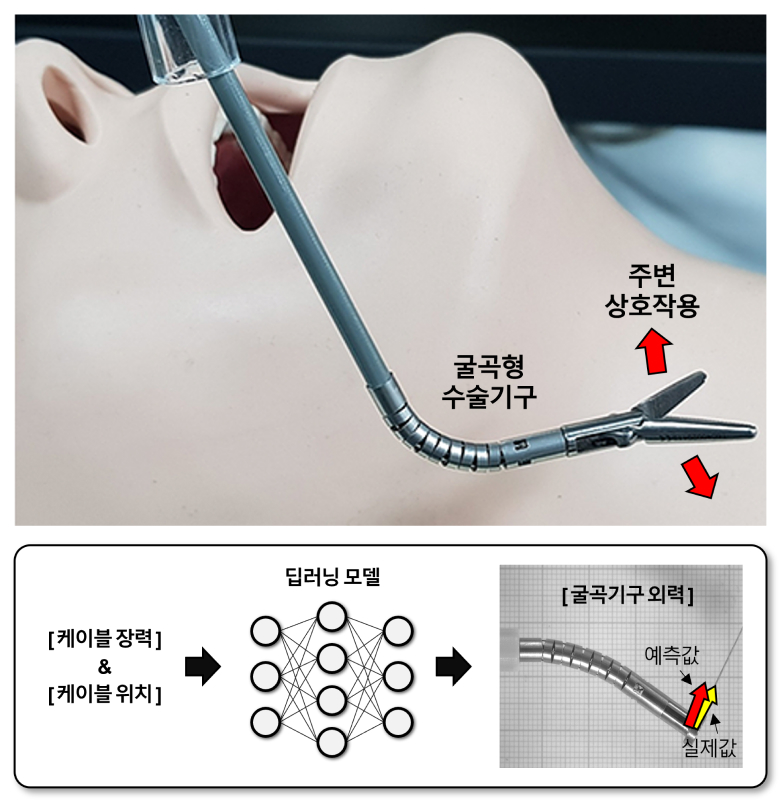
- 수술 도구에 추가 센서를 장착하지 않고, 구동 케이블의 장력과 모터 위치 데이터를 딥러닝 기법으로 활용해 굴곡기구 말단의 외력을 간접적으로 추정.
- 제작된 굴곡기구 프로토타입을 통해 외력 추정 모델의 성능을 평가하고, 그 우수성을 검증함.