IJPEM
Vibration-Damped Tool Holders in Industrial Robotic Machining Systems
한국생산기술연구원, ‘정밀 로봇 가공용 툴홀더 개발’ 가공성 18% 개선
이학준/한국생산기술연구원
- 다품종 유연가공 요구 증가로 인한 로봇 가공 산업의 수요가 늘어나고 있으나 로봇의 강성문제로 인한 가공물의 품질저하 문제가 있음.
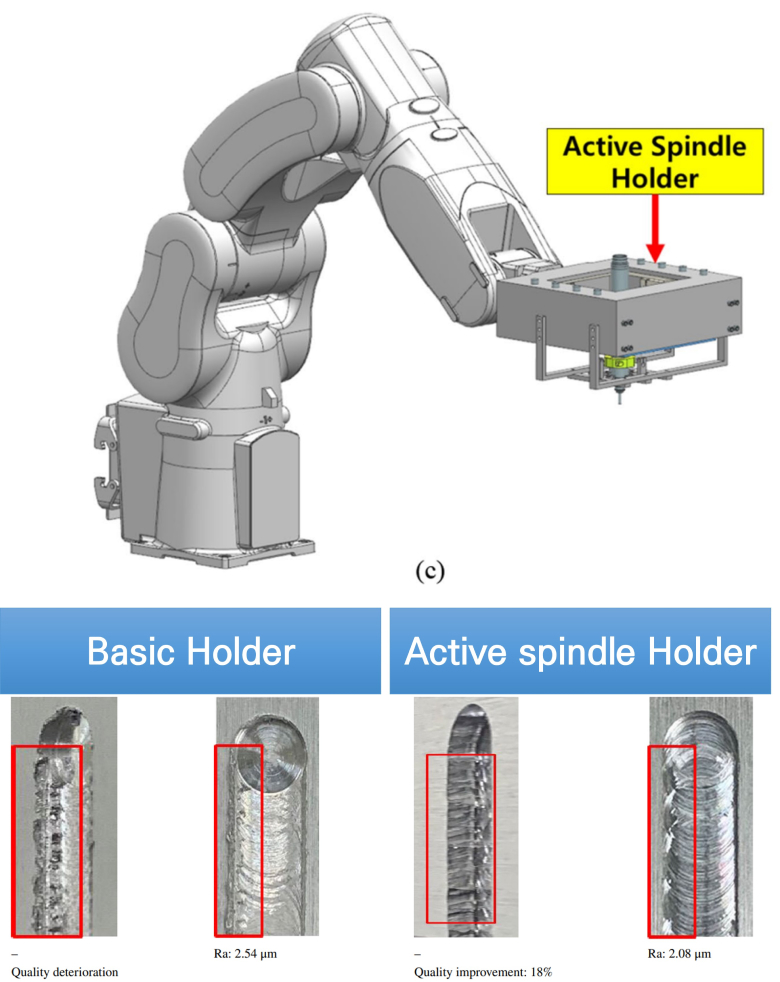
- 본 논문에서는 압전소자와 유연기구(Flexure)를 이용한 3자유도 로봇 툴 홀더를 제안 및 개발하였음.
- 가공 로봇 툴 홀더는 압전소자와 정전용량형 변위센서를 통해 실시간으로 가공 진동을 제어.
- 제안한 툴홀더를 장착하여 가공 시 기존 스핀들 홀더보다 가공정밀도 (Ra)가 18% 개선됨을 확인