IJPEM
Cooperative Underwater Vehicle-Manipulator Operation Using Redundant Resolution Method
수중 작업을 위한 효율적인 협업 기반 양팔 매니퓰레이터 작업 알고리즘 개발
서태원/한양대학교, 진상록/부산대학교
-
수중 로봇에 부착 가능한 양팔 매니퓰레이터 모듈을 설계 및 제작하였다.
-
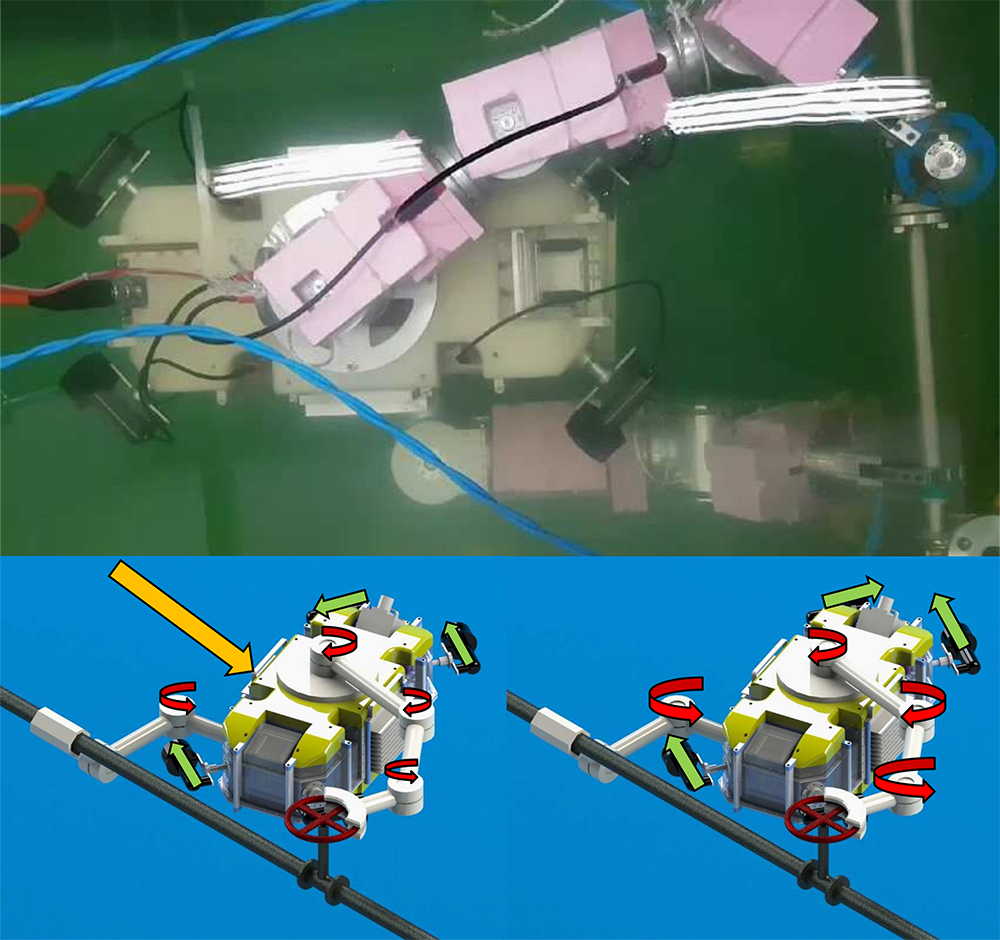
양팔 매니퓰레이터의 힘과 수중 로봇의 스러스터 힘을 동시에 사용하여 효율적인 작업을 진행할 수 있는 알고리즘을 개발하였다.
-
해류 등에 의한 외란이 유입될 때 두 시스템간의 협업으로 안정적인 외란 보정이 가능한 알고리즘을 개발하였다.
-
해당 알고리즘을 수중 로봇과 양팔 매니퓰레이터를 이용한 실험을 통해 검증하였다.