IJPEM
Development of a Variable Stiffness Modulating Mechanism Based on Phase-Change Material and a Temperature Control System
A novel variable stiffness modulating mechanism based on phase-change material for a surgical robot.
김영진, Handdeut Chang, Hardik J. Pandya/인천대학교
-
One of the challenges of using an endoscopic robot for natural orifice transluminal endoscopic surgery (NOTES) is the ability to adjust its joint stiffness. The endoscopic robot joint needs low stiffness to move through paths in the human body without damaging tissues and high stiffness to keep its shape as a platform for inserting a surgical tool or operating.
-
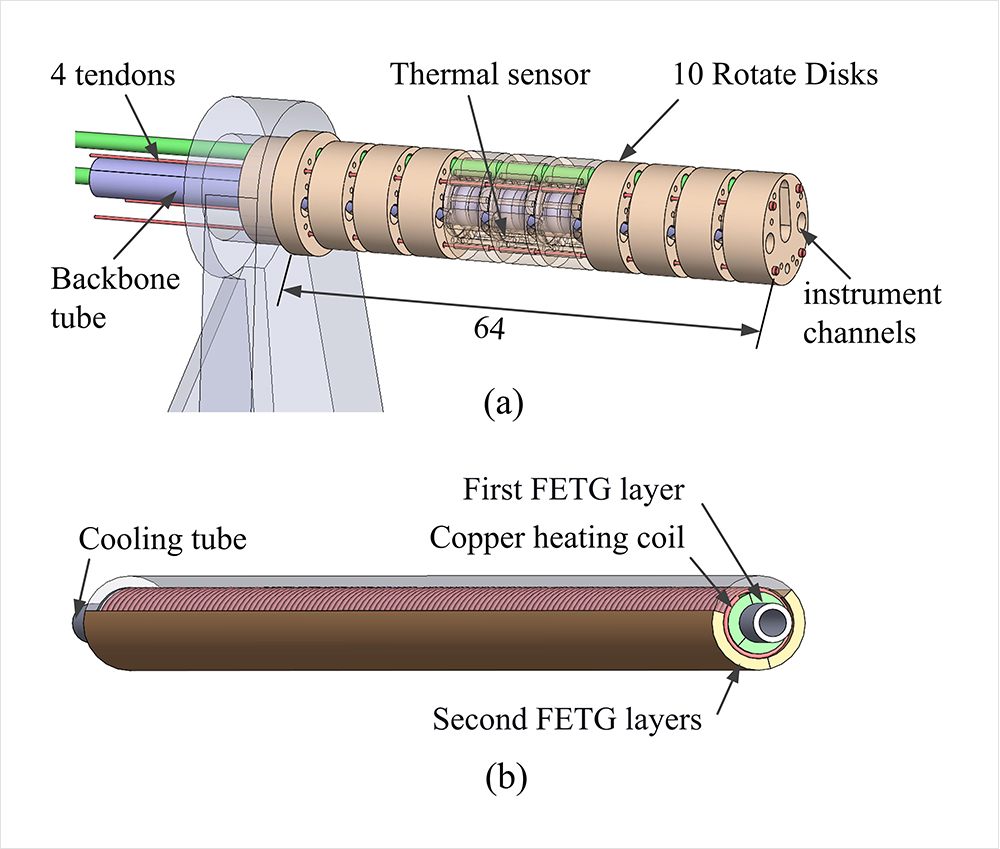
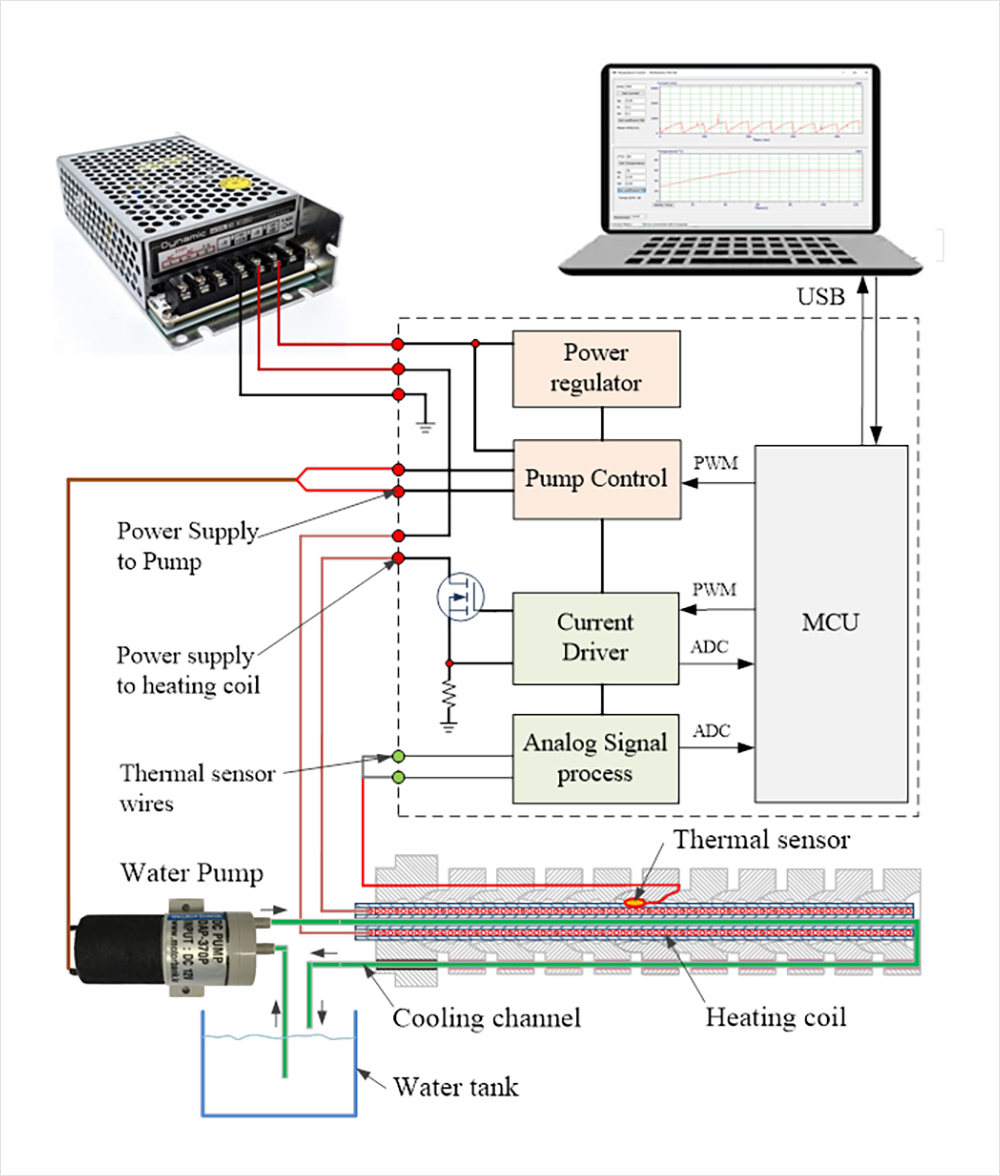
The proposed endoscopic robot in this paper consists of a variable stiffness backbone that is made of polyethylene terephthalate glycol (PETG), and have a heating coil and cooling tube to adjust its temperature; spacer disks to serially form a robotic body by connecting them; the tendon cables to bend the robot; and a thermal sensor.
-
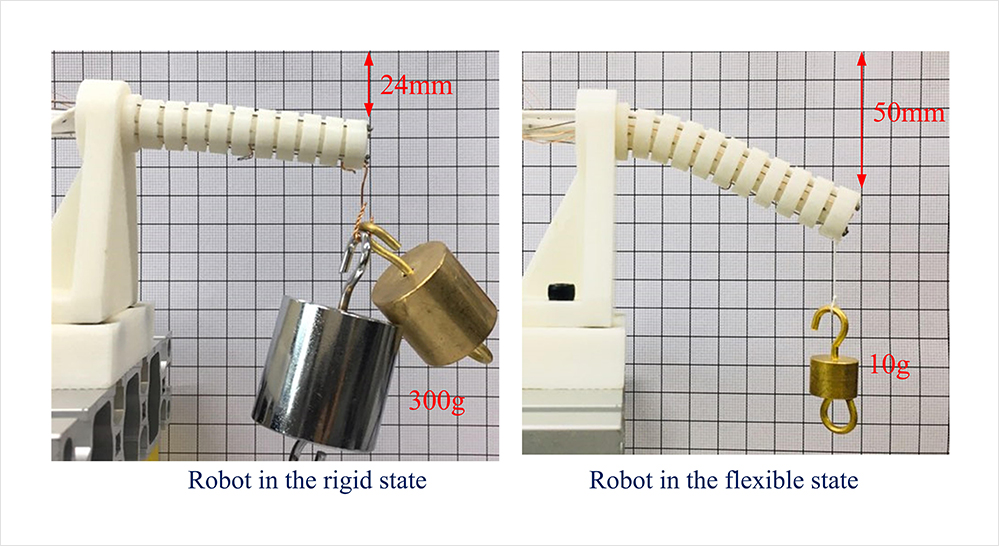
The robot has a wide range of flexural stiffness with 16.3 Ncm2 in the flexible state and 328.5 Ncm2 in the rigid state, and its state change quickly with a heating time of 25.5 s and a cooling time of 34.5 s.
-
The endoscopic robot can load up to 300g with a deflection of 8mm in the rigid state, while in the soft state it can be deformed to 30mm with a load of 10g.
-
The proposed variable stiffness manipulator can be a new solution for the flexible endoscopic robot.